八咫烏-国際大会CANSAT
開発期間: 6ヶ月
使用言語: C++ (mbed compiler)
担当: PM
開発人数: 5人
概要

2018 Cansat European Competitionにて製作した小型模擬人工衛星,「八咫烏(Yatagarasu)」です.
2017年日本大会の山岳遭難者を捜索するCANSAT「Gemini」の後継機で,ロケットにより上空で放出された後,パラフォイルを利用した航法制御により発信機の場所まで向かい,ローバの走行によって発信機の位置まで辿り着くことをミッションとしたCANSATです.
目的と課題
遭難者捜索CANSAT「Gemini」の後継機として,ただ降下して遭難者の位置を特定するだけではなく,パラフォイルを利用した航法制御に加え,走行機構を取り付けることにより,遭難者を想定した発信機に接近することを目的としたCANSATの製作を行いました.航法制御と走行制御のどちらも同一デバイスによって行う必要があるため,モード切り替えやパラフォイルの切り離しを行う必要があります.
ミッション
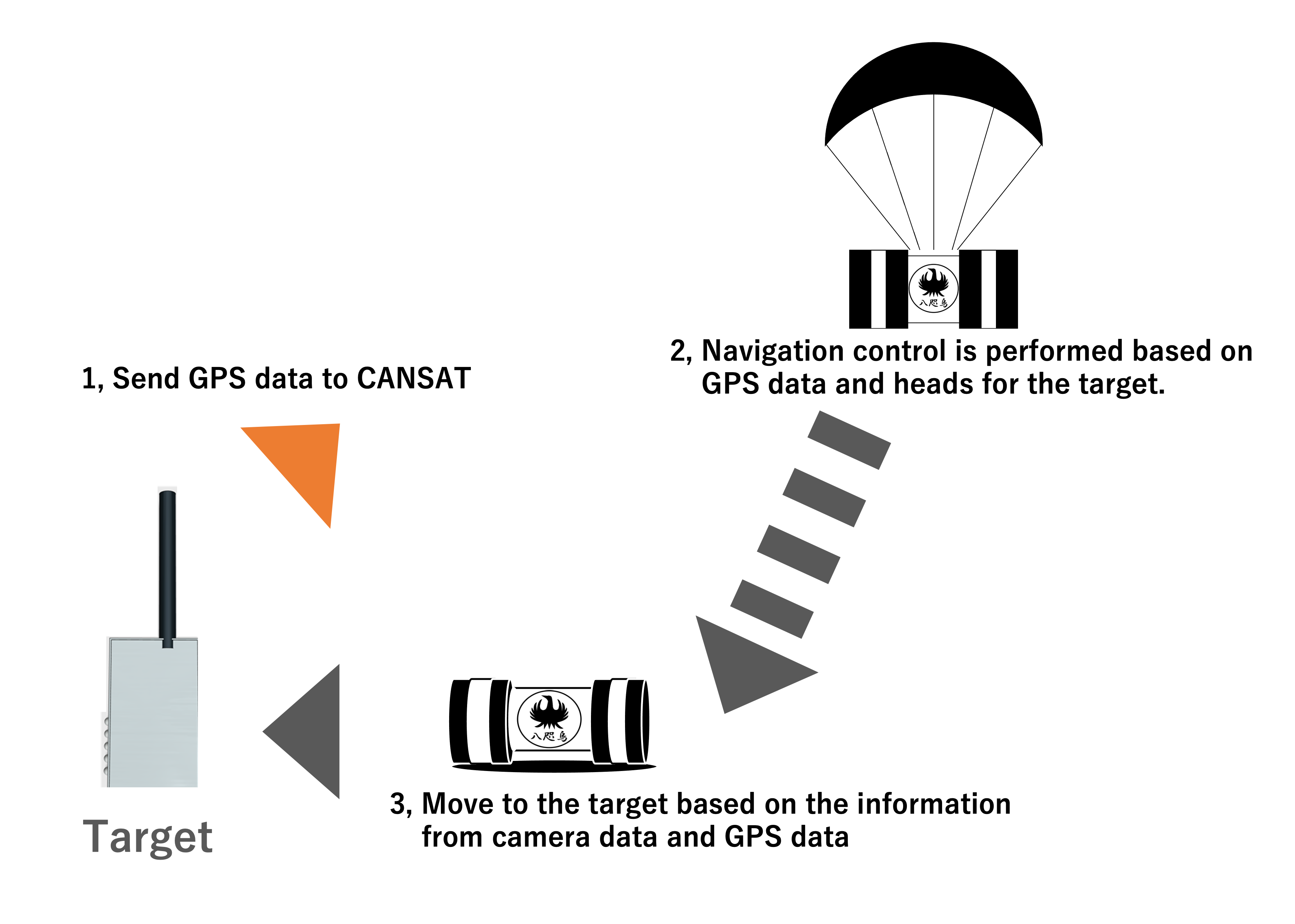
ロケット放出後,初めに発信機のデータを取得し,そのGPSデータとCANSATのGPSデータを元に航法制御を行います.着陸した後はパラフォイルを切断し,ローバーモードに切り替え,取得したGPSデータを元に発信機まで向かいます.
構成
設計は123Designを用いて行い,Eagleを使って設計されたプリント基盤によって配線が簡略化されています.また-10℃の環境下でも10時間の運用が確認しているリチウムイオン電池と,走行モードの際に必要な安定棒射出装置,通信機には2.4ghzの「XBeeS2C」を搭載してそれぞれの機能をになっています.
システムは航法モードと走行モードからなり,気圧センサによって高度を算出し,地上の着陸を確認すると安定棒を出すことによってパラフォイルを切り離し,走行モードへと移行します.